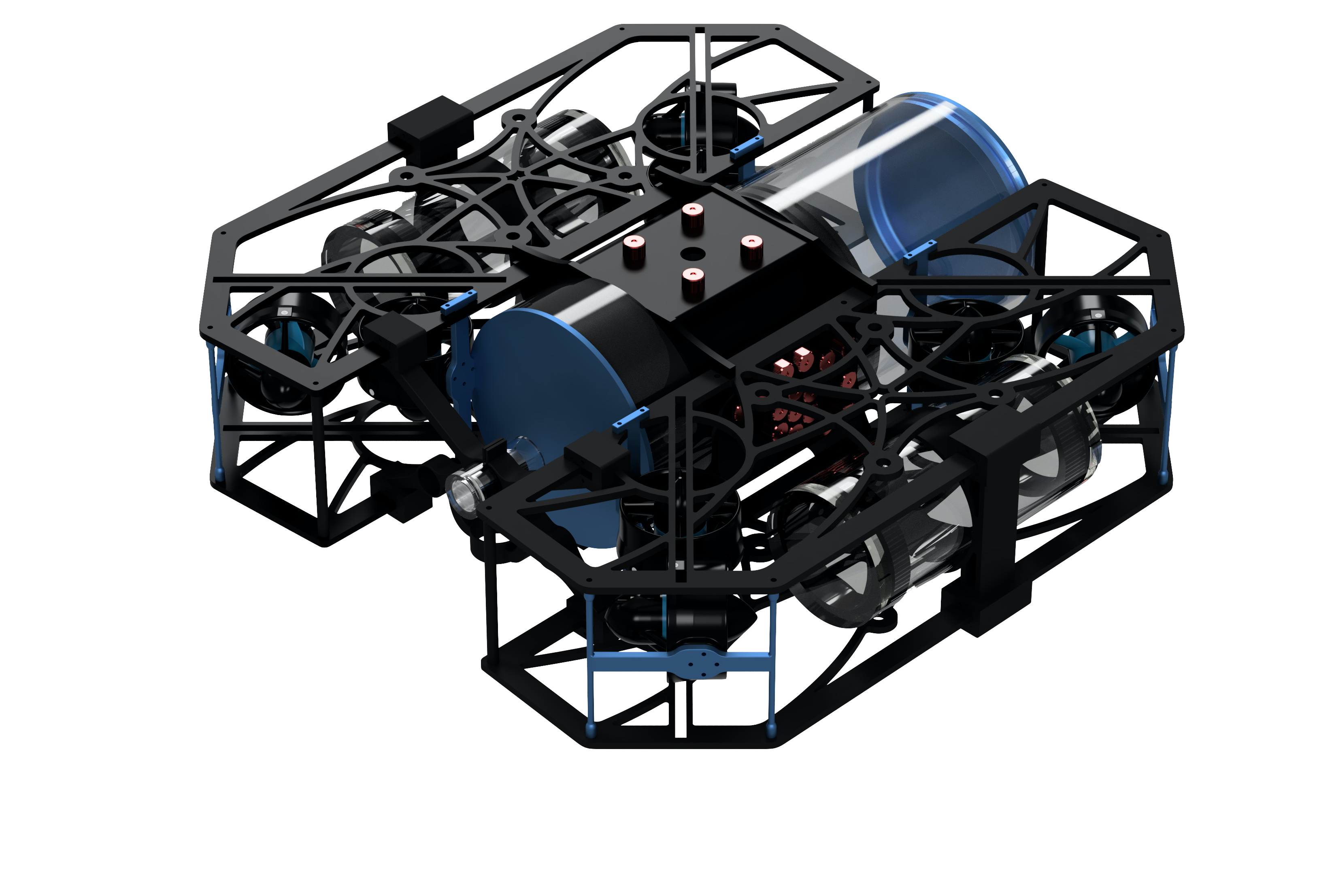
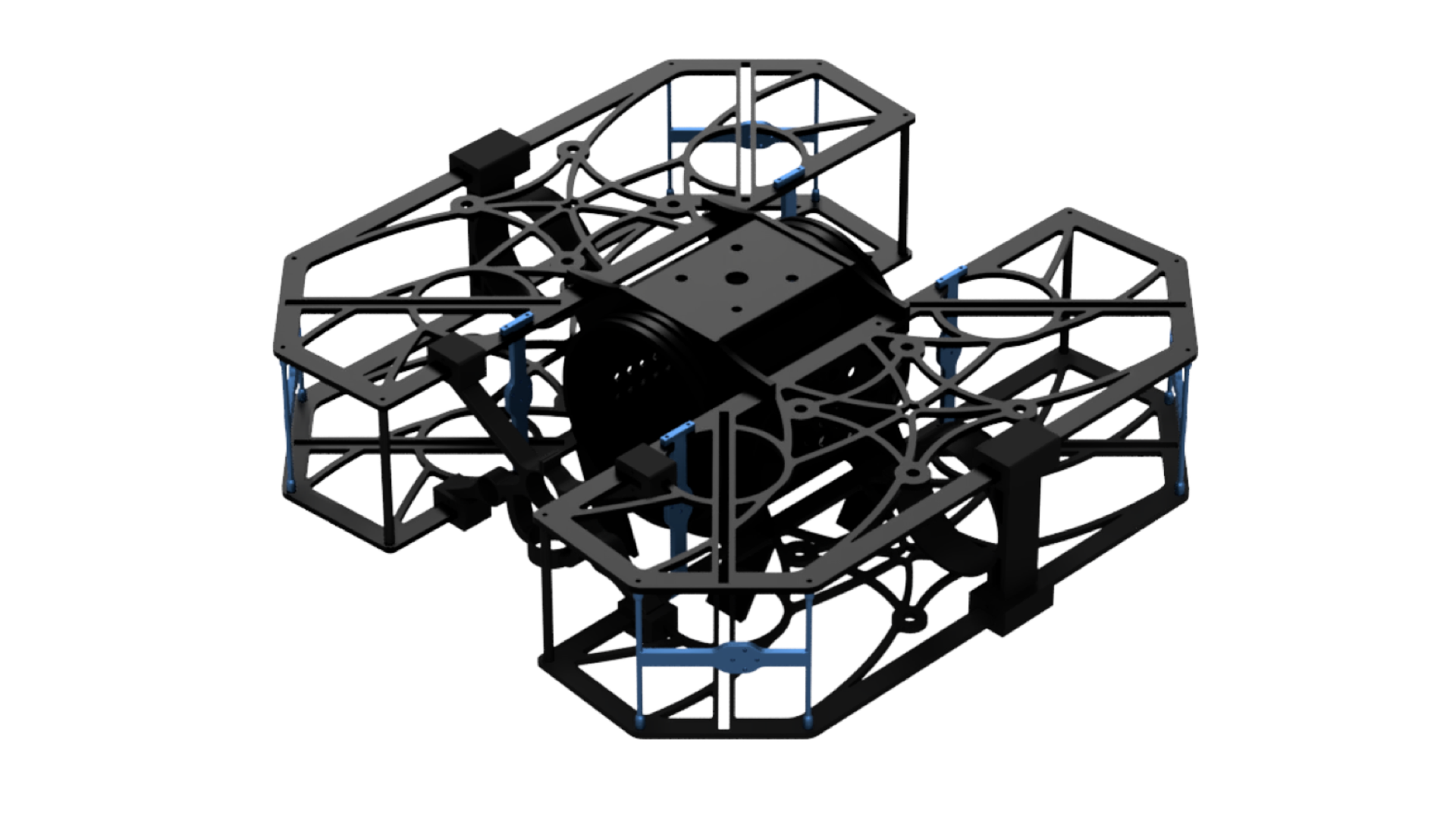
Named in accordance with the RoboSub 2020 theme, Tuolomee AUV is BeaverAUV's fourth iteration of an underwater vehicle. It is a highly robust design which allows components to be easily installed, repaired, and updated. All components were precision machined to insure watertightness to maximize functionality. Tuolomee AUV is highly manuverable and incredibly stable in the water. Tuolomee AUV's eight thrusters enable precise and fast movement. It is guided by a collection of sensors and a camera and powered by on-board electronics. Scroll down to learn more about the mechanical, electrical, and software components of the AUV.

Mechanics
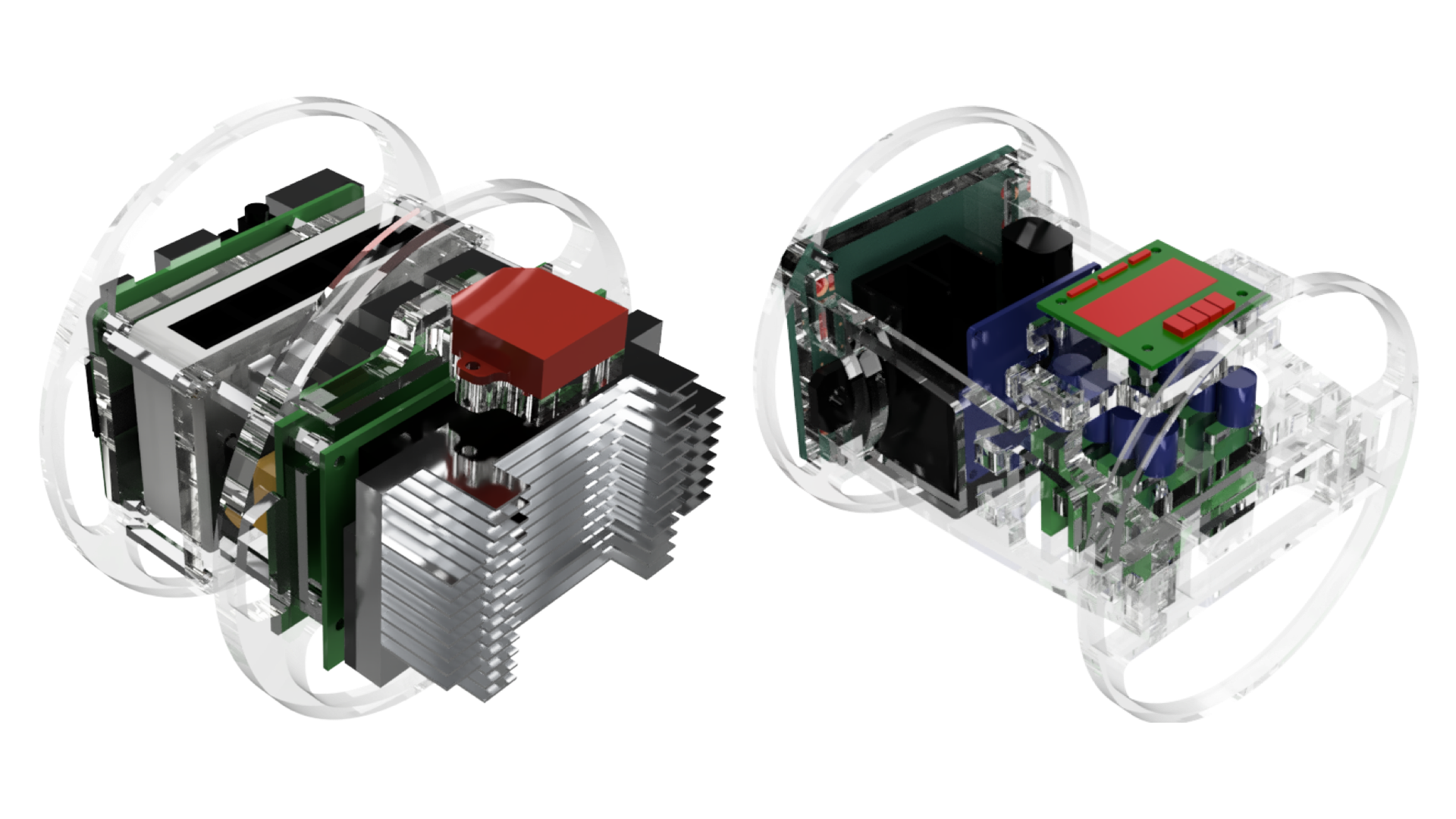
Electronics
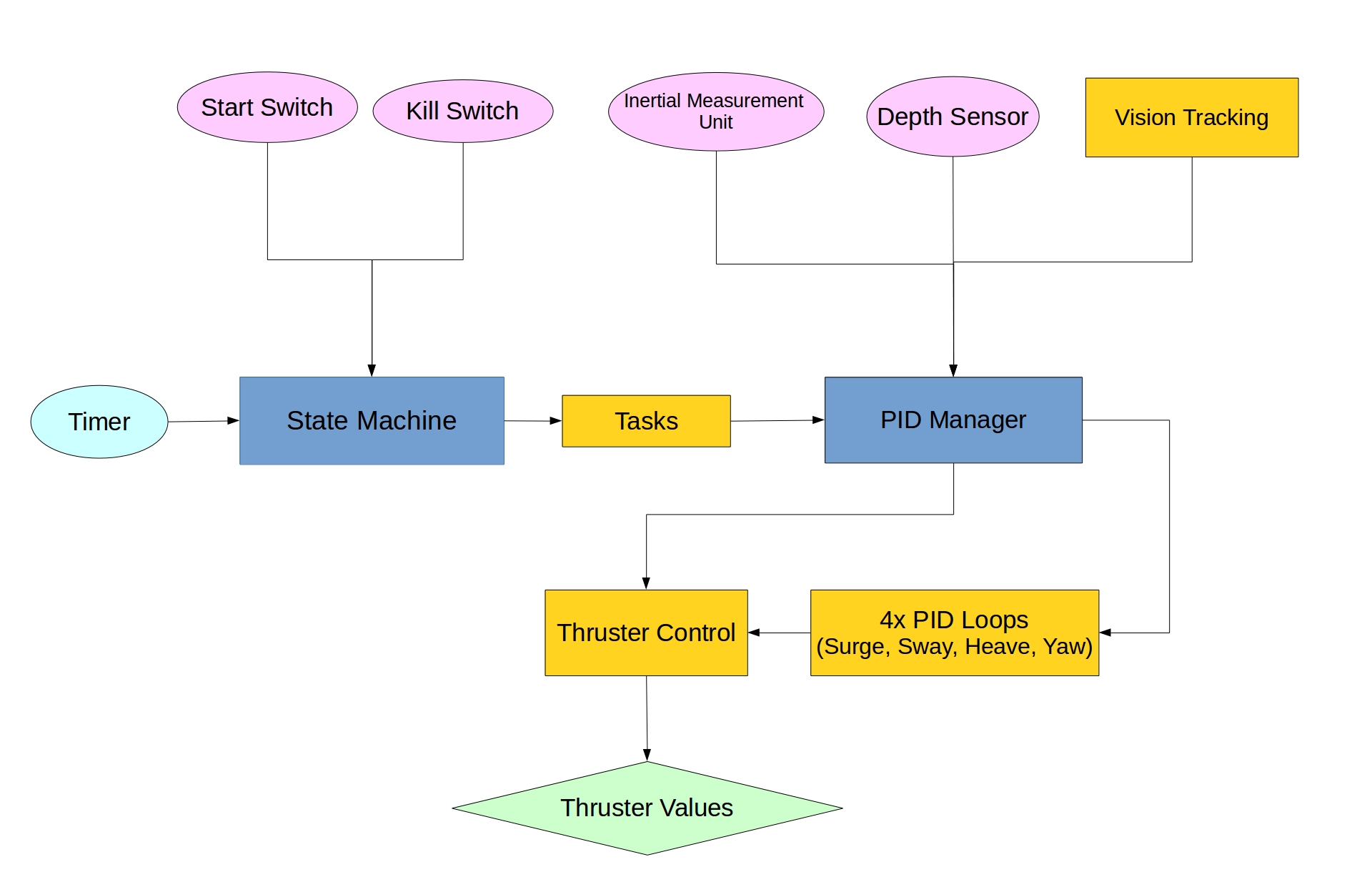
Software